P-1:半導体測定装置の振動解析
①現状モデルの振動変位
- まずは現状の振動状態を把握します。そして変位が大きい部分を確認して対策案を考えます。
②計画の立案と効果の検証
- 設計変更を加えるために解析計画を立案します。
- 振動変位を減少させるためにどの部分に感度があるかあらかじめ把握しておきます。
- いくつかの設計案の中から実現可能性のある設計案を採用します。
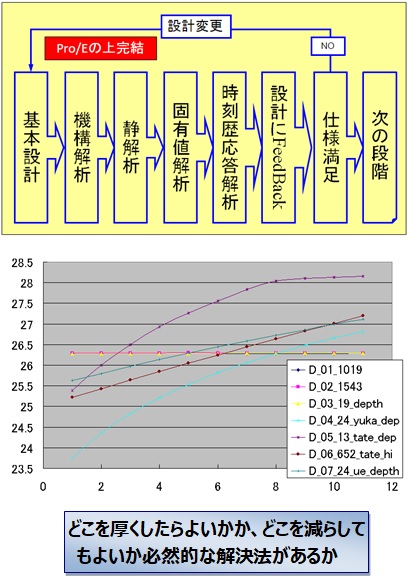
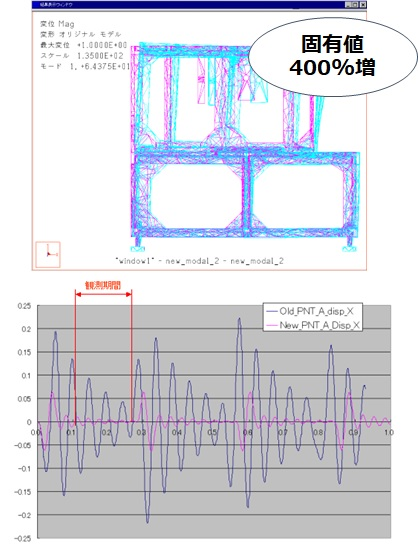
③設計案の決定
- この解析は設計者自ら実施したものです。
- いくつかある設計案から採用できる案を実施しました。
- その結果、モデルの固有値を約400%上げることに成功して振動変位も減少できました。
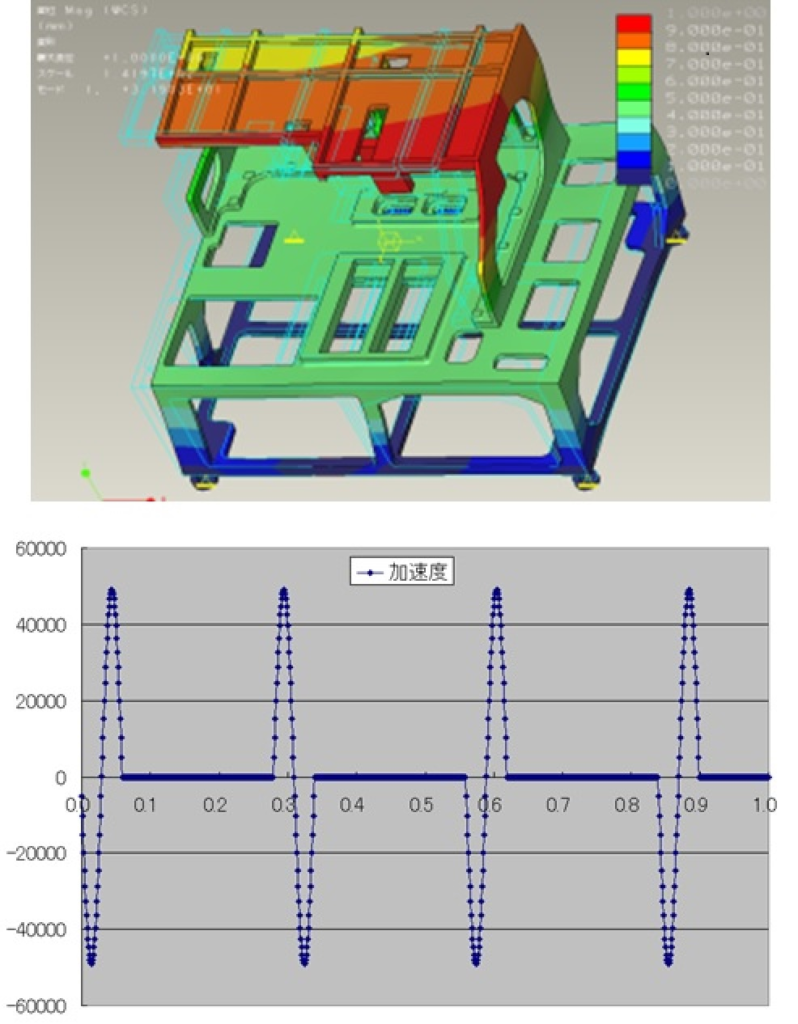
P-2.車載電子製品の耐振解析
①解析条件
- トラックに搭載された車載電子機器の耐振解析の紹介をします。
- 車載電子機器には悪路から大きな加速度を受けるのでそれに耐えられる耐振性が求められます。

②解析の実施
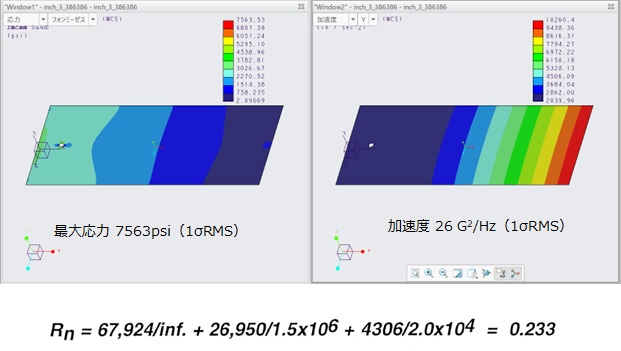
- 車載精密機器モデルに対してランダム振動加速度PSDを加えて加速度応答PSDおよび実効値RSMを解析します。
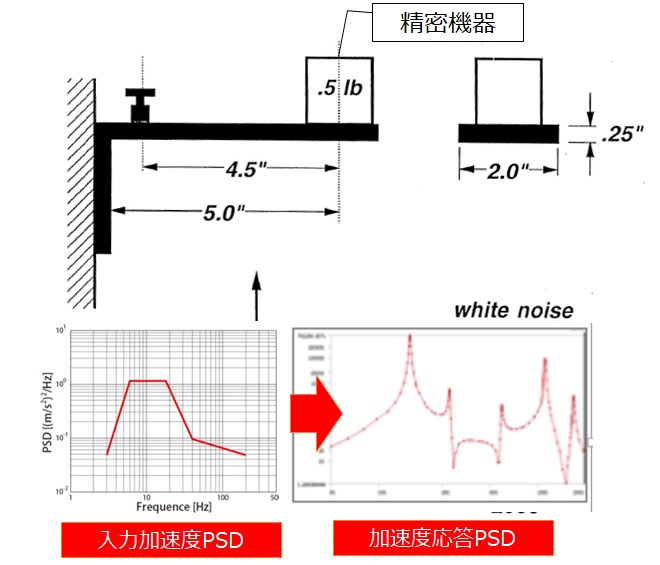
③結果の確認
- 悪路を走行するトラックに搭載する精密機器の耐振設計
- 規格の入力加速度パワースペクトル密度(PSD)に対して、加速度応答PSDと応力応答PSD及び実効値RMSを求める
- マイナー則に基づいた、疲労損傷度算出
P-3.ラックの耐震解析(応答スペクトル解析)
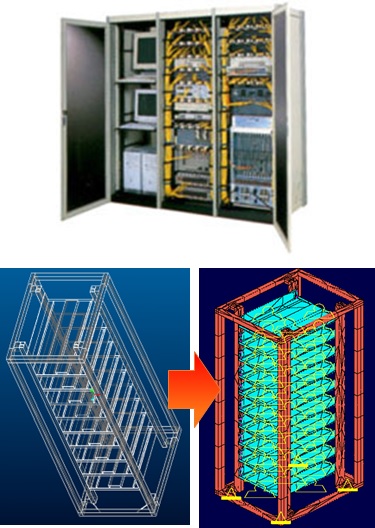
①ラックのモデル化
- 精密機器を格納しているラックには地震などの揺れに対して耐震性が求められています。
- ラックをモデル化して応答スペクトル解析を実施します。
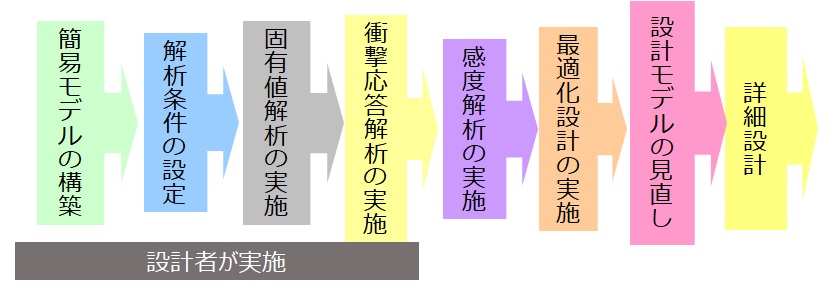
②検討の流れ
- この検討は設計者自ら実施しています。
- 簡易モデルの構築から固有値解析実施、衝撃応答解析を実施して現状の衝撃のかかり方を確認します。
- その後、感度解析、パラメータースタデイによる最適化を実施して設計モデルを決定しています。
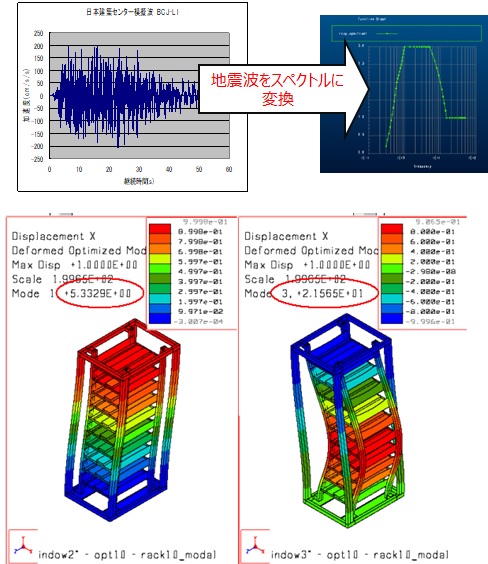
③応答スペクトル解析
- 地震波をスペクトルに変換してラックを加震した結果を示します。
- モードシェイプを確認して、感度のありそうな部品形状を抽出します。
P-4.レーザースキャナーユニットミラー振動低減
①現状モデルの固有値解析
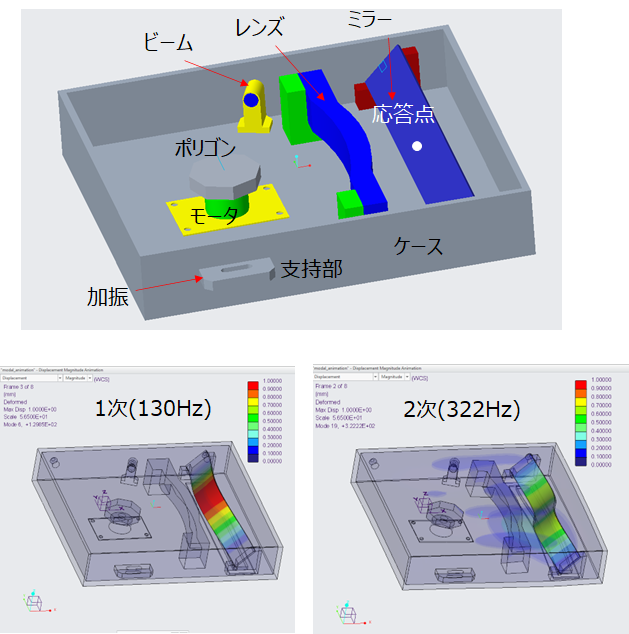
- 精密機器の画像書き込み装置(レーザースキャナーユニット)のミラーが外部から受ける振動に対して大きく揺れると画像書き込み位置がずれてしまう可能性があります。
- まずはレーザースキャナーユニット全体の固有値を確認します。
- ミラーの固有値は1次モードが130Hz,2次モードが322Hzにあることが確認できました。
- 周波数応答解析を実施すると変位は1次モードに加速度は2次モードに関係していることがわかりました。
②最適化の実施
- 変位と加速度の最大値が最小となる目的関数を付けてミラーの厚みと幅を変数として最適化ソフトで最適化を実施します。
- 最適化のアルゴリズムはNCGA(近傍交叉にもとづく多目的遺伝的アルゴリズム)です。
③最適化の効果
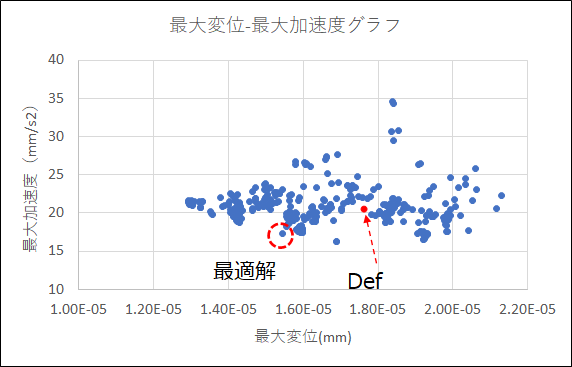
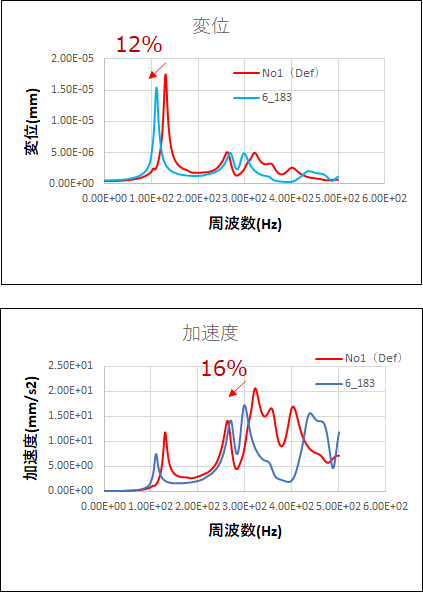
- 変位の最小化と加速度の最小化はトレードオフの関係にあるため複数の解が出てきます。
- この解の中から変位,加速度ともに減少している最適解を求めました。
P-5.回転機械のロバスト設計
①モデルとパラメータの設定
- 1DCAEで回転機械のトルク変動を評価します。
- 立ち上がりのリップルが大きいためリップルが低減して早く安定するようにタグチメソッドのパラメータ設計を実施しました。
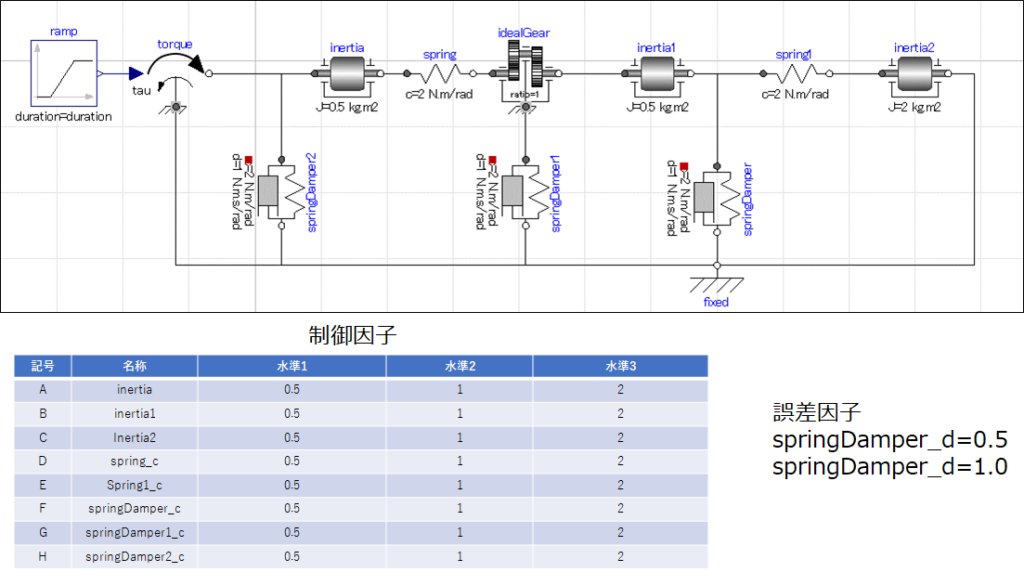
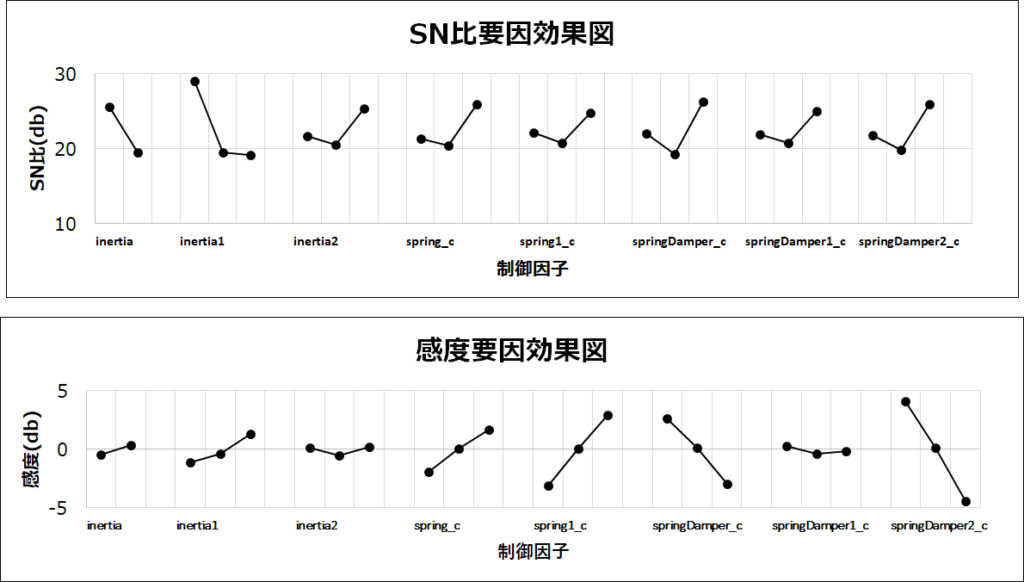
②要因効果図による評価
- タグチメソッドではSN比というバラツキを評価する指標で各パラメータの要因を確認します。
- そして現行条件とSN比の高い最適条件を出します。
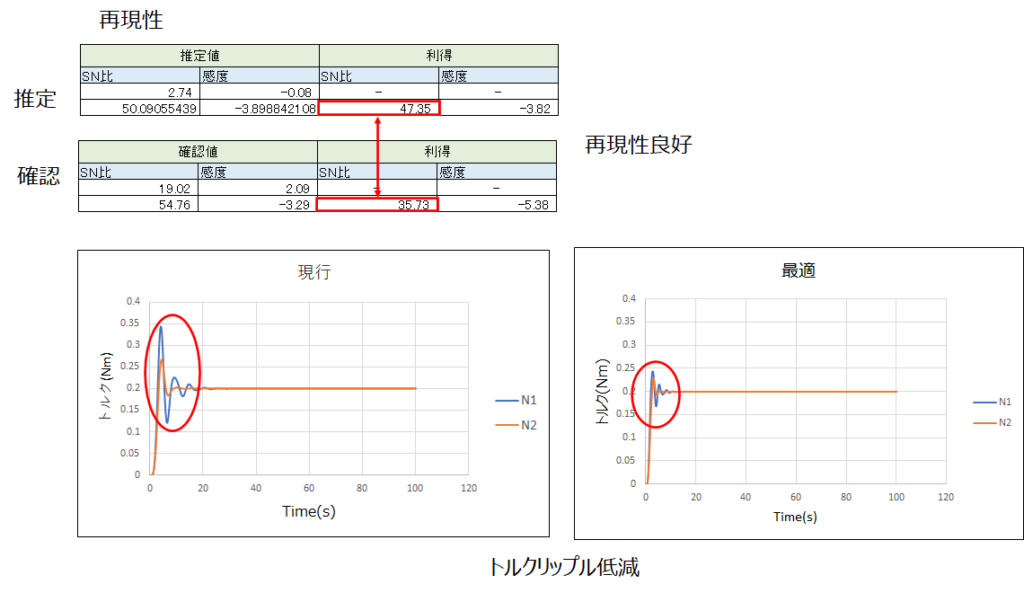
③再現性の確認と効果の検証
- 導き出した最適条件で確認実験を実施します。
- SN比の利得(現行SN比と最適SN比の差分)を算出すると推定利得と確認利得の一致が確認できます。
- 導き出した評価方法と結果の確からしさが検証されました。
- 効果を検証すると初期のリップルは低減してトルクが早く安定することが確認できます。
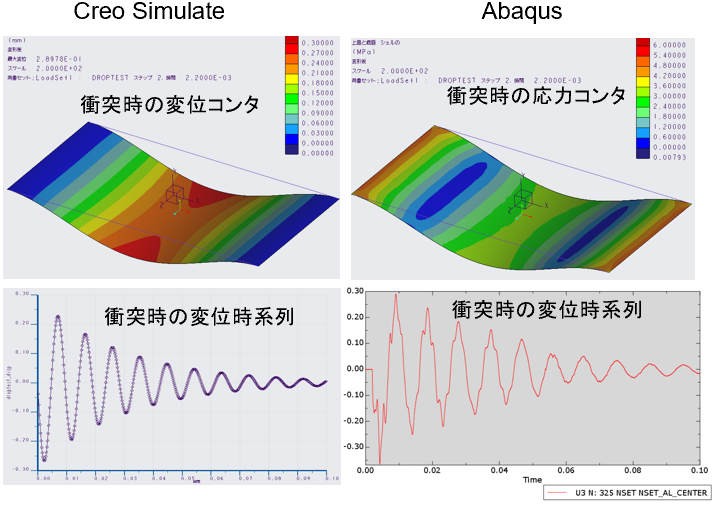
P-6.携帯電話の落下衝撃簡易解析
①課題と目的
- 携帯電話が落下することにより、衝撃を受けて破損してしまう。
- 落下による衝撃を受けても携帯電話の損傷が少なくなるように携帯電話の形状を変更する。

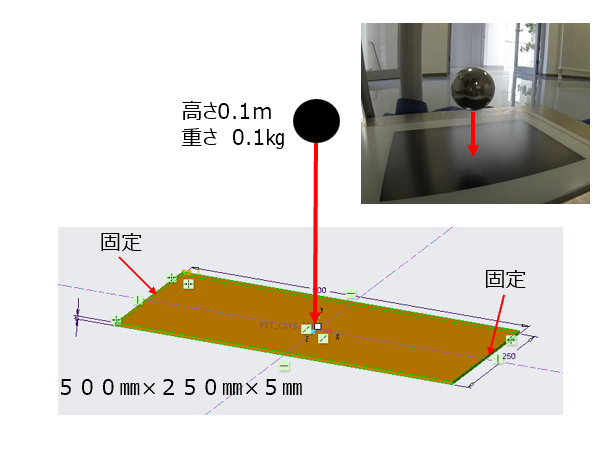
②解析モデル
- 重さ0.1kgの鉄球を高さ0.1mから落下させてアルミニウムのプレートに衝撃荷重を加えるモデル
- アルミ形状は500mm×250mm×5mmで両端を固定拘束している。
③解析結果
- Creo SimulateとAbaqusで結果を比較すると大きな差異はない
- 落下による損傷を評価できないが、Creo Simulateでも設計変更による落下への影響を調べることができる。